")
































西門(mén)子plc s7300/s7400使用置位復(fù)位指令的順序控制程序
作者:置位復(fù)位指令 發(fā)布日期:2020-12-17 22:25:55 閱讀:0
二維碼分享
使用置位復(fù)位指令的順序控制程序
1.運(yùn)輸帶控制的程序設(shè)計(jì)
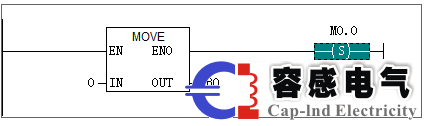
用新建項(xiàng)目向?qū)梢粋€(gè)名為“運(yùn)輸帶順控”的項(xiàng)目(見(jiàn)隨書(shū)光盤(pán)中的同名CPU為CPU 315-2DP。執(zhí)行SIMATIC管理器的菜單命令“插入”-“S 7塊”一“組織塊”, 將組織改為“OB100”。單擊“確定”按鈕確認(rèn)。雙擊打開(kāi)OB 100, 用MOVE指令將順序功能圖中的各步(M 0.0~M 0.3) 清零初始步M0.0置位為活動(dòng)步。
2.控制步的轉(zhuǎn)換的電路設(shè)計(jì)方法
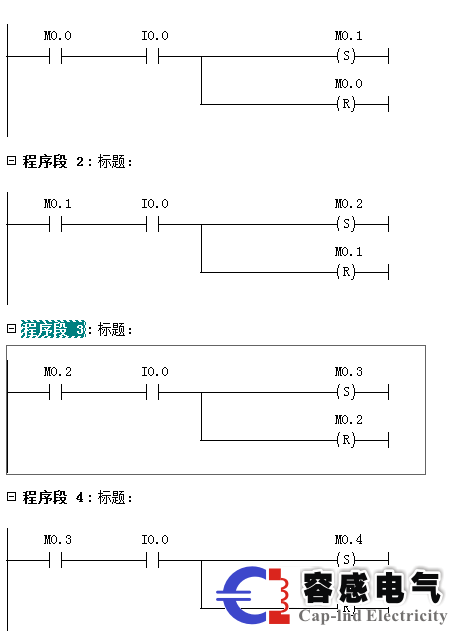
在順序功能圖中,如果某一轉(zhuǎn)換所有的前級(jí)步都是活動(dòng)步,并且滿(mǎn)足該轉(zhuǎn)換對(duì)應(yīng)的轉(zhuǎn)換條件,則應(yīng)實(shí)現(xiàn)轉(zhuǎn)換,即轉(zhuǎn)換所有的后續(xù)步都應(yīng)變?yōu)榛顒?dòng)步,該轉(zhuǎn)換所有的前級(jí)步都應(yīng)變?yōu)椴换顒?dòng)步。用該轉(zhuǎn)換所有前級(jí)步對(duì)應(yīng)的存儲(chǔ)器位(M)的常開(kāi)觸點(diǎn)與轉(zhuǎn)換條件對(duì)應(yīng)的觸點(diǎn)或電路串聯(lián),來(lái)使所有后續(xù)步對(duì)應(yīng)的存儲(chǔ)器位置位和所用前級(jí)步對(duì)應(yīng)的存儲(chǔ)器位復(fù)位。在任何情況下, 代表步的存儲(chǔ)器控制電路都可以用這一原則來(lái)設(shè)計(jì),每一個(gè)轉(zhuǎn)換對(duì)應(yīng)一個(gè)這樣的控制置位和復(fù)位的電路塊,有多少個(gè)轉(zhuǎn)換就有多少個(gè)這樣的電路塊,這種設(shè)計(jì)方法特別有規(guī)律,在設(shè)計(jì)復(fù)雜的順序功能圖的梯形圖時(shí)既容易掌握,又不容易出錯(cuò)。
實(shí)現(xiàn)初始步下面的10.0對(duì)應(yīng)的轉(zhuǎn)換需要同時(shí)滿(mǎn)足兩個(gè)條件,即該轉(zhuǎn)換的前級(jí)步是活動(dòng)少 (M0.0為1狀態(tài))和轉(zhuǎn)換條件滿(mǎn)足(10.0為1狀態(tài)),在樣形圖中,用M0.0和1.0的常開(kāi)觸點(diǎn)組成的川聯(lián)電路來(lái)表示上述條件,該電路接通時(shí),兩個(gè)條件間時(shí)滿(mǎn)足,此時(shí)應(yīng)將該轉(zhuǎn)換的后續(xù)步變?yōu)榛顒?dòng)步,即用置位指令(S指令)將M0.1置位,還應(yīng)將該轉(zhuǎn)換的前級(jí)步變?yōu)椴换顒?dòng)步,山川復(fù)位指令(R指令)將M0.0復(fù)位。圖中的程序段1-4是用上述方法編寫(xiě)的控制少M(fèi)0.0~M0.3的置位復(fù)位電路,每一個(gè)轉(zhuǎn)換對(duì)應(yīng)一個(gè)這樣的電路。
3.輸出電路的處理
應(yīng)根據(jù)順序功能圖,用代表步的存儲(chǔ)器位的常開(kāi)觸點(diǎn)或它們的并聯(lián)電路來(lái)控制輸出位的線(xiàn)圈,Q4.1僅僅在步M0.0為1狀態(tài),它們的波形完全相同,因此可以用M0.2的常開(kāi)觸點(diǎn)直接控制Q4.1的線(xiàn)圈。接通延時(shí)定時(shí)器TO的線(xiàn)圈僅在步M0.1接通,因此用M0.1的常開(kāi)觸點(diǎn)控制TO的線(xiàn)圈,山于同樣的原因,用M0.3的常開(kāi)觸點(diǎn)控制T1的線(xiàn)圈,Q4.0的線(xiàn)圈在步M0.1~M0.3均為1狀態(tài),因此將M0.1-M0.的常開(kāi)觸點(diǎn)并聯(lián)后,來(lái)控制Q4.0的線(xiàn)圈。
4.程序的調(diào)試
順序功能圖是用來(lái)描述控制系統(tǒng)的外部性能的,因此應(yīng)根據(jù)順序功能圖而不是梯形圖來(lái)調(diào)試順序控制程序,打開(kāi)PLCSIM, 生成IB 0、QB 4、MB 0、T 0和T 1的視圖對(duì)象 。將所有的邏輯塊下載到仿真西門(mén)子plc, 將仿真西門(mén)子plc切換到RUN-P模式。由于執(zhí)行了OB 100的程序,初始步對(duì)應(yīng)的M0.0為1狀態(tài),其余各步對(duì)應(yīng)的存儲(chǔ)器位為0狀態(tài)。
單出兩次PLCSIM中1.0對(duì)應(yīng)的小方框, 模擬按下和放開(kāi)起動(dòng)核鈕,初始步下面的轉(zhuǎn)換條件滿(mǎn)足,M0.0變?yōu)?狀態(tài),M0.1和Q.0變?yōu)?狀態(tài),說(shuō)明轉(zhuǎn)換到了起動(dòng)延時(shí)步,T0的當(dāng)值從600(單位為10mm)開(kāi)始不斷減少,減到0時(shí),6s處時(shí)結(jié)束,M0變?yōu)?狀態(tài),M0.2和Q4.1變?yōu)?狀態(tài),說(shuō)明轉(zhuǎn)換到了步M0.2。
單出兩次101對(duì)應(yīng)的小力框,模擬按下和放開(kāi)停車(chē)按鈕。步M0.2下面的轉(zhuǎn)換條件見(jiàn),M02和Q.1變?yōu)?狀態(tài),M0.3變?yōu)?狀態(tài),說(shuō)明轉(zhuǎn)換到了停車(chē)延時(shí)步。TI的當(dāng)前值從300(單位為10m#)開(kāi)始不斷減少,減到0時(shí),s的延時(shí)結(jié)東,M0.3和Q4.0少為0狀態(tài),M0.0變?yōu)?狀態(tài),返回到初始步M0.0。
5.三條運(yùn)偷帶的控制
三條運(yùn)愉帶序機(jī)連,按下起動(dòng)按鈕102,1號(hào)運(yùn)輸帶開(kāi)始運(yùn)行,5s后2號(hào)運(yùn)輸帶自動(dòng)起動(dòng),再過(guò)58后3號(hào)壇輸帶自動(dòng)起動(dòng),停機(jī)的順序與起動(dòng)的順序剛好相反,即按了停止按鈕10.3后,先停3號(hào)運(yùn)輸帶,5s后停2號(hào)運(yùn)輸帶,再過(guò)5s停1號(hào)運(yùn)輸帶, Q4.2Q4.4分別控制1~3號(hào)壇輸帶,畫(huà)出3條運(yùn)輸帶控制的順序功能圖,根據(jù)順序功能圖,設(shè)計(jì)出梯形圖程序。打開(kāi)PLCSIM,將程序下到仿真西門(mén)子plc, 將CPU切換到RUN-P模式后調(diào)試程序, 直到滿(mǎn)足要求。
總結(jié):以上內(nèi)容就是小編為大家介紹的西門(mén)子plc s7300,s7400使用置位復(fù)位指令的順序控制程序,本公司是西門(mén)子plc代理商,如果您有這方面的任何需求,歡迎大家咨詢(xún)?nèi)莞须姎猓覀儗⒔o您真誠(chéng)的服務(wù)。
免責(zé)聲明:本文免費(fèi)為大家學(xué)習(xí)、研究、欣賞,歡迎讀者訪(fǎng)問(wèn)和交流,其版權(quán)歸原著者擁有;本網(wǎng)站所有軟件和資料均為網(wǎng)友推薦收集整理而來(lái),禁止商用。本網(wǎng)站不保證本站提供的下載資源的準(zhǔn)確性、安全性和完整性;同時(shí)本網(wǎng)站也不承擔(dān)用戶(hù)因使用這些下載資源對(duì)自己和他人造成任何形式的損失或傷害;如涉及版權(quán),請(qǐng)聯(lián)系刪除!
總結(jié):以上內(nèi)容就是小編為大家介紹的西門(mén)子plc s7300,s7400使用置位復(fù)位指令的順序控制程序,本公司是西門(mén)子plc代理商,如果您有這方面的任何需求,歡迎大家咨詢(xún)?nèi)莞须姎猓覀儗⒔o您真誠(chéng)的服務(wù)。
免責(zé)聲明:本文免費(fèi)為大家學(xué)習(xí)、研究、欣賞,歡迎讀者訪(fǎng)問(wèn)和交流,其版權(quán)歸原著者擁有;本網(wǎng)站所有軟件和資料均為網(wǎng)友推薦收集整理而來(lái),禁止商用。本網(wǎng)站不保證本站提供的下載資源的準(zhǔn)確性、安全性和完整性;同時(shí)本網(wǎng)站也不承擔(dān)用戶(hù)因使用這些下載資源對(duì)自己和他人造成任何形式的損失或傷害;如涉及版權(quán),請(qǐng)聯(lián)系刪除!
此文關(guān)鍵字: 復(fù)位指令,置位指令,CPU 315-2DP,s7300,s7400
聲明:本文源自容感電氣整合整理,如本站文章和轉(zhuǎn)稿涉及版權(quán)等問(wèn)題,請(qǐng)作者在及時(shí)聯(lián)系本站,我們會(huì)盡快處理。
標(biāo)題:西門(mén)子plc s7300/s7400使用置位復(fù)位指令的順序控制程序 地址:http://www.changqingshui.cn/hangye/3925.html
標(biāo)題:西門(mén)子plc s7300/s7400使用置位復(fù)位指令的順序控制程序 地址:http://www.changqingshui.cn/hangye/3925.html
方面的應(yīng)用")
方面的plc控制系統(tǒng)")
子plc SIMATIC S7-1500和ET200MP的應(yīng)用領(lǐng)域")
子plc可編程控制器邏輯編程要點(diǎn)")
子S7-1500智能工業(yè)平臺(tái)發(fā)布")
子plc控制柜控制系統(tǒng)原理說(shuō)明")
子plc 6ES7412-2EK06-0AB0 S7400 系列PLC的故障排除")
子6ES7 288-1SR60-0AA0PLC 維修和維護(hù)介紹")
子plc 6ES7 288-1ST20-0AA0終端功能概述")
子6ES7 288-1SR60-0AA0PLC外部數(shù)據(jù)輸入方法")
子6ES7 288-1SR40-0AA0PLC結(jié)構(gòu)和各部件的作用")
子6ES7 288-1SR20-0AA0 PLC系統(tǒng)內(nèi)部干擾")